Comments Off on Innovation of Robotic Welding Automation
Innovation of Robotic Welding Automation
Share with
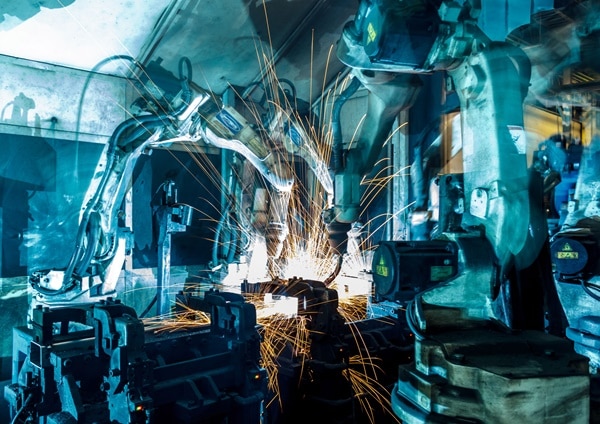
Robotic welding systems have been used in different types of manufacturing. They can provide several benefits in welding applications. The most prominent advantages of robotic welding are precision and productivity. Another benefit is that labor costs can be reduced. Robotic welding also reduces risk by moving the human welder/operator away from hazardous fumes and molten metal close to the welding arc. The robotic welding system usually involves measuring and identifying the component to be welded, welding it in position, controlling the welding parameters and documenting the produced welds. However, traditional robotic welding systems rely heavily upon human intervention. It does not seem that the traditional robotic welding techniques by themselves can cope well with uncertainties in the welding surroundings and conditions, e.g. variation of weld pool dynamics, fluxion, solid, weld torch, and etc. On the other hand, the advent of intelligent techniques provides us with a powerful tool for solving demanding real-world problems with uncertain and unpredictable environments. There are several different types of robotic welding processes, each with its own benefits and types of applications. Although this is far from comprehensive list, the following are some of the most common forms of robotic welding:
1. Arc Welding: is a welding process that is used to join metal to metal by using electricity to create enough heat to melt metal, and the melted metals when cool result in a binding of the metals. It is a type of welding that uses a welding power supply to create an electric arc between an metal stick (“electrode”) and the base material to melt the metals at the point-of-contact. Arc welders can use either direct (DC) or alternating (AC) current, and consumable or non-consumable electrodes. The welding area is usually protected by some type of shielding gas, vapor, or slag. Arc welding processes may be manual, semi-automatic, or fully automated. First developed in the late part of the 19th century, arc welding became commercially important in shipbuilding during the Second World War. Today it remains an important process for the fabrication of steel structures and vehicles
2. Resistance Welding: Resistance welding is a welding technology widely used in manufacturing industry for joining metal sheets and components. The weld is made by conducting a strong current through the metal combination to heat up and finally melt the metals at localized point(s) predetermined by the design of the electrodes and/or the workpieces to be welded. A force is always applied before, during and after the application of current to confine the contact area at the weld interfaces and, in some applications, to forge the workpieces
3. Spot Welding: a type of resistance welding, spot welding joins thin metals that resist electrical currents. It’s typically used in the automotive industry to join sheet metal frames together. Resistance spot welding (RSW) is a process in which contacting metal surface points are joined by the heat obtained from resistance to electric current. It is a subset of electric resistance welding.
4. TIG Welding: a high-quality process where an arc is formed between a non-consumable tungsten electrode and the metal part. Also known as Gas Tungsten Arc Welding (GTAW), TIG welding is used when precision is of the utmost importance.
5. MIG Welding: a high deposition rate process that involves feeding a wire continuously toward the heated weld tip. Also known as Gas Metal Arc Welding (GMAW), it is best for applications where system simplicity and speed are desirable.
6. Laser Welding: a laser generator delivers via a fiber optic cable a laser light through a robotic cutting head to weld pieces together. Laser welding, including remote laser welding for hard to reach weld locations, is often used in high volume applications that require high accuracy, such as the automotive sector or in the medical or jewelry industries.
7. Plasma Welding: ionized gas passes through a copper nozzle to produce extremely high temperatures. Plasma welding is used when flexibility is required, as velocity and temperatures can be easily adjusted.
While there are dozens of other types of robotic welding processes out there, the 7 listed above are some of the most common and are deployed across the industrial sector for various applications. If you have a grasp on these processes, you have a good understand of the robotic welding landscape, in terms of the processes they perform.
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.